

この組紐製造機の動作は、正直、ゆっくりです。
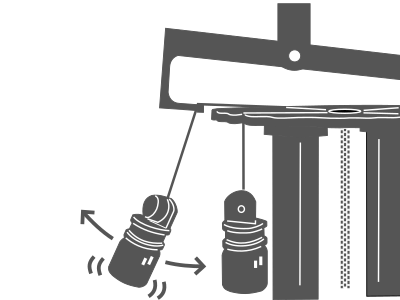
テンションを掛けるのに錘玉を使うこの方式は、振り子の原理で、停止後の振幅により隣の紐に絡まるおそれがあります。
これを防ぐため、移動速度を簡単な台形制御していますが、十分ではありません。
3Dプリンタで作成された部品、特にギアの精度の問題で、個体さらには角度により摩擦が異なります。
これに対処するため、位置検出からスピードを計算し、モーター出力にフィードバックしていますが、検出位置の分解能は高くないため、応答速度も遅くなってしまいます。
したがって、アームのスピードを、錘紐の揺れを完全に抑えるほど滑らかに、均一に制御できないのです。
実はモーターの性能では、もっと速く動かせるのですが、これを制限せざるを得ないのです。
たとえ精度の問題をクリアしても、共振や不意の外部からの力に対応するという難しい問題が残ります。
結局、速度を求めるならば、この釣り錘の方式ではなく、別の方式を検討しなくてはならないでしょう。
実際、業務用の機械は、機械的にテンションを掛ける方式になっています。
この組紐製造機は、古来の方式を再現することを目的の一つとしていますので、現在のスピードを大幅に改善することはできないと考えています。